Seth Nielsen
Robotics Engineer
I thrive at the intersection of software and the physical world.
My journey has been defined by turning complex ideas into functional, real-world solutions.
This space showcases projects where I’ve pushed boundaries and developed complete, end-to-end solutions.
MS - Electrical and Computer Engineering
Brigham Young University - 2021
BS - Mechanical Engineering, Computer Science Minor
Brigham Young University - 2018
About Me
I have an interdisciplinary background that includes an undergraduate degree in Mechanical Engineering with a Computer Science minor and an MS in Electrical Engineering, where I performed research in navigation and perception in unstructured environments, with a focus on autonomous landing of multirotors and eVTOL aircraft.
My experience includes industry work at a large company and a seed stage startup, internships, engineering competitions, research fellowships, and personal projects. I love working on teams to create things that perform in the real world.
In my work experience, I’ve ventured into aerospace, where precision and reliability are paramount. Subsequently, I worked at a cutting-edge, fast-paced smart home startup where I built the entire platform for sensing and the automation engine from the ground up.
Click here to see my resume.
Video Highlights
Here are a few video highlights of my accomplishments.
At Zero Home, I wrote the software for a people-tracking algorithm and designed an array of 50+ radars throughout the home to track where any number of people are in the home at any given time. I also wrote the automations engine that commands lights, sound, touchscreens, and shades as people move about the home. The following videos showcase different scenarios of the automations engine in action:
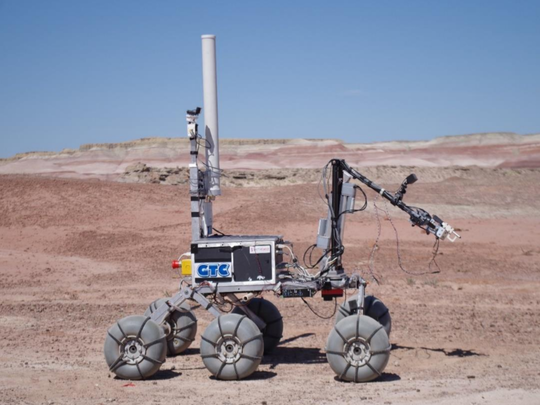
At the University Rover Challenge, I was the primary engineer for the Autonomous Traversal Task. See my team’s rover perform a fully autonomous search, detect and approach for the final goal marker, achieving first place in the task:
Watch the flight of an eVTOL aircraft controlled by PWM commands in a modded version of Microsoft AirSim, for which I was the principal designer:
Skills
Team development
Arch, Ubuntu
Real-time 3D simulation
Projects


Lead engineer of autonomous navigation for the BYU Mars Rover Team: the only team to complete the final, fully autonomous navigation portion of task.
I was a primary operator of the rover in the competition and throughout development, and I wrote the navigation and sensing software that guided the rover to the goal markers.


Experience
- Engineered and launched from concept to completion the end-to-end sensing and automation platform for a cutting-edge startup specializing in the complete design and implementation of smart homes
- Designed an innovative people-tracking algorithm utilizing an array of 50+ radars and led the architectural design for their optimal placement throughout the home
- Developed a comprehensive automation software for real-time control of home systems, including lighting, sound, shades, and touchscreens based on human presence and movements
- Spearheaded the development of a live, full-scale house prototype that showcased real-time operations, leading to commitments from multiple investors totaling 4 million dollars
- Developed autonomous flight safety systems to detect anomalies and initiate auto-termination procedures
- Created a tool to convert telemetry messages into raw sensor data to play back into simulations for flight tests that have failed
- Extended software for outputting sensor data to binary to work with a new IMU and made a Python tool to parse and visualize the binary data
- Created a simulator from scratch that combines high-end graphics with real autopilot software to produce a high-fidelity SITL flight and camera simulation for UAVs, now used by other students for research and adopted by a university course to teach vision-based quadrotor control
- Built a completely new vehicle type - eVTOL aircraft - for Microsoft AirSim, a simulator for multirotors, including dynamics model, control inputs, animated mesh, and PX4 autopilot integration in photorealistic city environment powered by Unreal Engine
- Investigated the use of various sensors in the autonomous landing of multirotors on arbitrary ships at sea and of eVTOL aircraft in urban environments
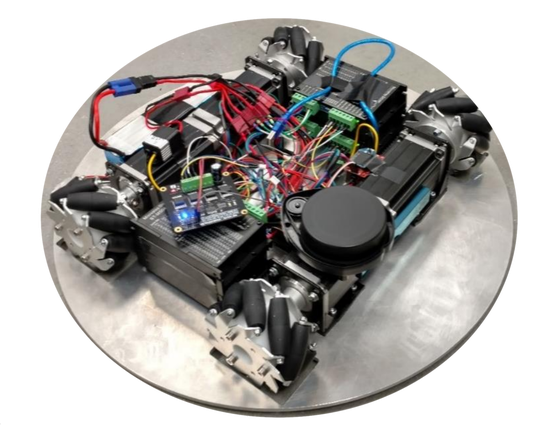
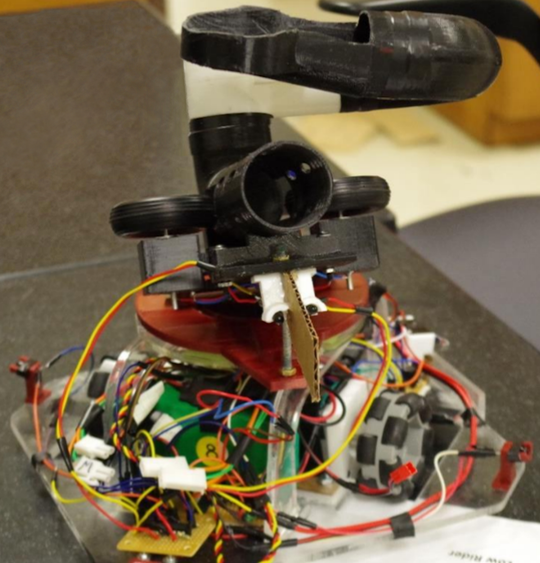
- Designed and built prototype of robotic self-parking chair capable of moving a 200-lb person
- Designed the mechanical and electrical components, then manufactured them
- Wrote high-level and low-level software for onboard computer and microcontrollers
- Conducted tests, analyzed performance, discovered design flaw and made a completely new design
- Built and tested second prototype which satisfied company’s goals for mobility, load capacity and stability
- Characterized energetic cocrystals of HMX and ammonium perchlorate for use in solid composite propellants
- Performed planar laser induced fluorescence to analyze flame structure, species concentration, and burn rate of energetic cocrystals
- Published results in technical paper
- Studied surface roughness and porosity of various sample types of carbon nanotubes for future applications that require atomically smooth surfaces
- Operated atomic force microscope and scanning electron microscope to take measurements and confirm results
- Taught students outside of class the concepts of Newtonian physics and aided them in completion of homework and studying for tests
- Guided students through experiments in electricity and magnetism
- Produced CAD designs in SolidWorks of advanced, lifetime-rated polypropylene piping systems