Self-Parking Chair
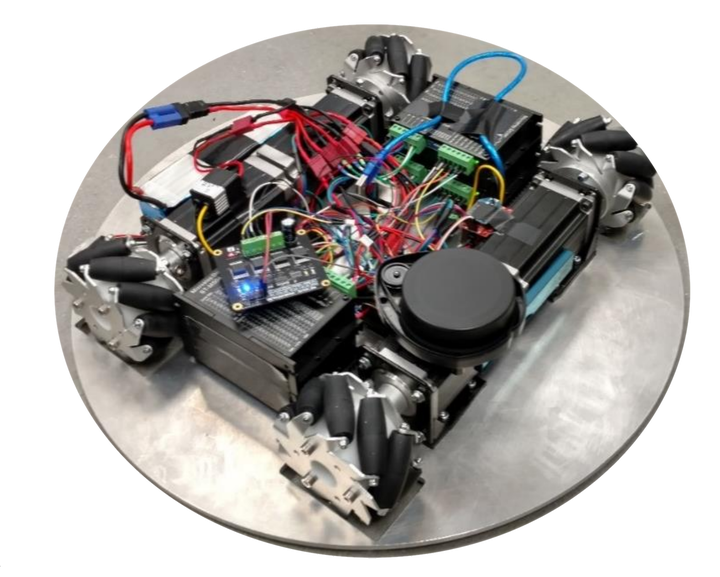 Mobile chair base
Mobile chair baseDesigned and built prototype of robotic self-parking chair capable of moving a 200-pound person.
Designed the mechanical and electrical components, then manufactured them.
Wrote high-level and low-level software for onboard computer and microcontrollers.
Conducted tests, analyzed the prototype’s performance, discovered a design flaw and made a completely new design.
Built and tested a second prototype which satisfied company’s goals for mobility, load capacity and stability.

Seth Nielsen
Robotics Engineer
My research involves navigation and perception in unstructured environments, with a focus on autonomous landing of multirotors and eVTOL aircraft. I also have experience in building photorealistic software-in-the-loop simulations for UAVs.